Hardware
Pohon – Elektromotory
Typy elektromotorů
Elektromotory rozdělujeme na střídavé a stejnosměrné. Stejnosměrné motory napájíme stejnosměrným proudem a střídavé střídavým. Střídavé motory mají oproti stejnosměrným vyšší účinnost, jsou méně poruchové a mají velmi nízké nároky na údržbu. Jejich nevýhodou je, že potřebují regulátor pro změnu vstupního proudu. Stejnosměrné jsou z pravidla menší a bývají levnější.
Jak to funguje?
Stejnosměrný motor: jeho dvě hlavní části, rotor a stator, se neustále odpuzují. Mohou za to cívky na rotoru, které díky komutátoru mění orientaci svého magnetického pole tak, že se vždy odpuzují od magnetů statoru.
Střídavý motor: stejně jako stejnosměrný, se skládá ze dvou hlavních částí, statoru a rotoru. U předchozího typu byly cívky uloženy na rotoru. U tohoto typu jsou cívky fixně uložené na statoru. Prochází jimi střídavý proud, který od sebe odpuzuje magnety uložené na rotoru.
Hodnoty
Při výběru motoru sledujeme několik hodnot, které nám definují vlastnosti motoru. Můžeme se setkat například s takovýmto číslem 2212 850KV 12N14P, které nám říká že 22 je průměr motoru,12 výška motoru, 850KV říká otáčky motoru za minutu při napětí 1V, 12N je počet elektromagnetů ve statoru a 14P je počet permanentních magnetů v rotoru.
# Výpočty
Otáčky motoru: vezmeme hodnotu KV, v našem případě 850, a vynásobíme ji napětím baterie.
Příklad: 850 * 11.1 = 9435 otáček za minutu.
Další informace

Ukázka připojení motorů
Slovníček pojmů
Rám
Popis
Při výběru rámu sledujeme několik parametrů. Dva nejdůležitější jsou tvar a velikost. U specializovanějších modelů můžeme sledovat i materiál (např. karbon dobře blokuje signál, tudíž nemusí být vhodný pro drony určené na dlouhý dolet), upevnění baterie nebo možnost uložení kamery.
Tvar
Nám určuje, kolik motorů můžeme na dron usadit a jak. Společně s velikostí nám říká, co vše na dron můžeme upevnit a kam. To je také předem určeno umístěním otvorů, které je specifikováno danými standardy (např. běžné rozpětí upevňovacích otvorů FC je 30.5 mm).
Velikost
U nejběžnějších dronů (4 motory) určujeme velikost dle diagonálního rozpětí motorů (např. 250 mm je běžná velikost závodních dronů). Toto platí i u dronů například s osmi motory, kdy diagonála (např. 600 mm) určuje průměr dronu. V případě trikoptér (3 motory) se taktéž velikost udává průměrem dronu.
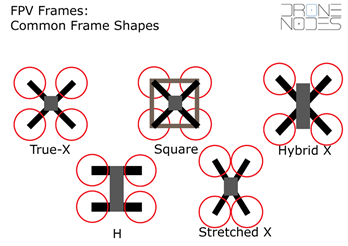
Ukázka tvarů rámů různých koptér
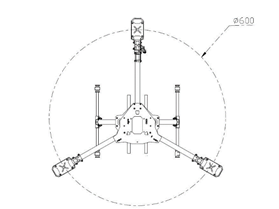
znázornění průměru motorů; zdroj: dronetrest.com
Materiály
Velmi oblíbený materiál u závodních či freestylových dronů je karbon, protože je lehký a velmi silný. Nevýhodou může být cena, stínění signálu nebo fakt, že karbon je vodivý, tudíž musíme dbát zvýšené opatrnosti na izolaci kabelů. Dalším velice oblíbeným materiálem je samozřejmě plast, a to díky jeho ceně a jednoduché manipulovatelnosti. Tento materiál můžeme vidět na dronech např. firmy DJI (populární drony na natáčení), plast nestíní signál zdaleka tak silně jako karbon, a není tedy třeba antény vyvádět ze šasi. U dronů na zakázku (průmyslové drony) je často využíván karbon v kombinaci s plastovými díly (nejčastěji na míru vytisknuté). Dron tak dosahuje pevnosti a zároveň modulárnosti.
Další informace
Regulátory (ESC)
# Popis
Regulátor neboli ESC nám v podstatně kontroluje rychlost otáčení motoru.
Typy
Při výběru regulátorů máme dvě možnosti: „single“ ESC nebo individuální. „Single“ ESC, nebo také „4 in 1 ESC“, je jediná deska, ke které připojujeme všechny motory. Tato deska je v podstatě složena ze čtyř individuálních regulátorů. Pokud zvolíme individuální regulátor, budeme potřebovat regulátor pro každý motor. Výhody „Single“ regulátoru jsou jednodušší vedení kabelů a menší hmotnost. Mezi hlavní nevýhody patří cena a při zkratu jedné části nefunkčnost celé desky. Hlavní výhodou individuálních ESC je jednoduchost výměny a již zmíněná cena.
Firmware
Je program, který určuje výkon, a které protokoly může ESC využívat. V dnešní době se nejčastěji setkáme s BLheli, SimonK a KISS firmwary. KISS je využíván pouze značkou KISS na jejich ESC. SimonK je s BLheli open source. SimonK je v dnešní době již poměrně zastaralý, proto je dnes nejrozšířenějším firmwarem BLheli.
BLheli: Dnes jsou k vidění hlavně dvě poslední generace tohoto firmwaru, BLheli_S (2. generace) a BLheli_32 (generace třetí). Třetí generace využívá 32 bitový procesor oproti 8 bitovémů využívaném generací druhou. Novější generace nám poskytuje více protokolů a více dat, která můžeme sledovat. Například aktuální spotřebu jednotlivého ESC.
Protokoly
Protokoly nám určují jak rychle regulátor komunikuje s řídící deskou. Obyčejný přijímač a servo mají mezi sebou odezvu přibližně 2ms, moderní protokoly snížili tuto hodnotu na pár desítek mikrosekund. Člověk není tak rychlý, aby dokázal poznat rozdíl mezi 80µs a 1ms, ale elektronika ano. Nejnovější protokol Dshot1200 má odezvu 13µs a vysoké rychlosti přenosu dat. Nejpopulárnější volbou je např. Dshot 600, který je široce dostupný a podporovaný. Dnes nejběžnějšími protokoly jsou Oneshot125 (125us – 250us), Oneshot 42 (42us – 84us), Multishot (5us – 25us), Dshot150 (106.8us), Dshot300 (53.4us).
Parametry
Při výběru regulátoru musíme sledovat několik parametrů. Vstupní napětí, maximální výstupní proud, rozměry, Firmware/Protokoly a BEC.
Vstupní napětí: záleží na baterii, kterou budeme dron napájet. Tento parametr je zobrazován v napětí nebo na počtu článků baterie např. 2S – 4S (dvou až čtyř článkové baterie).
Výstupní proud: pokud máme motor konzumující 30A je důležité, aby náš regulátor byl schopný tuto hodnotu dodávat. Samozřejmě motor nebude vždy plně zatížen, ale je dobré dodržovat určitou výkonnostní rezervu, případně rezervu pro budoucí upgrade. U regulátorů si můžeme většinou všimnout hodnoty burst, případně Peak Current. Tato hodnota nám určuje, jaký proud dokáže regulátor nabídnout, ovšem pouze pro krátký časový úsek.
BEC: nebo také obvod eliminátoru baterie je funkce, která nám nabízí konstantní proud po určitém napětí. Tato funkce je nejčastěji využívána u letadel, kdy z regulátoru napájíme přijímač a ostatní elektroniku (nejčastěji serva). U dronů tuto funkci nepotřebujeme díky PDB, které nám ostatní komponenty napájí.
Rozměry: „4 in 1“ ESC jsou většinou standardizované, aby pasovaly do věže společně s FC a PDB. U individuálních ESC je důležité, aby se nám vešly na rameno, kam se nejčastěji umisťují.
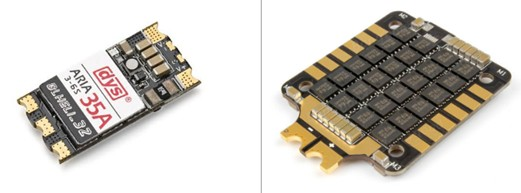
rozdíl mezi jednotlivým a 4in1 ESC; zdroj: dronenodes.com
Další informace
Slovníček pojmů
Flight controller
# Popis
Řídící deska, Flight controller nebo zkráceně FC je takový mozek dronu. Zpracovává signál z přijímače, dává povely motorům, hostí gyroskop, akcelerometr, barometr, kompas atd…
Typy
Flight controllery můžeme rozlišit na 4 základní typy F1, F3, F4 a F7. Hlavním rozdílem je procesor. Typy F1 a F3 (nástupce F1) jsou taktovány na 72 MHz, F4 na 168 MHz a F7 na 216 MHz. S vyšším výkonem procesoru mohou přibývat funkce, např: jestliže řídící deska typu F3 má Akcelerometr a gyroskop, F7 může mít tyto dva senzory plus barometr, možnost GPS a několik dalších rozšiřovacích portů. Dnes je nejrozšířenější deska F4 díky jejímu poměru cena/výkon.
Další známý typ desek se zabývá spíše na průmyslové užití. A to díky možnostem programovatelnosti a celkové konfigurovatelnosti. Velmi častým zástupcem tohoto typu jsou například desky Pixhawk užívající firmware Ardupilot. Tyto desky bývají v základu větší a poskytují větší počet I/O portů. Častěji se používají i u letadel. Tento flight controller je při správné konfiguraci schopen autonomního letu.
Firmware
Je nedílnou součástí řídící desky. Jeho pomocí nastavujeme vlastnosti dronu. Určujeme, jaké senzory budou zapnuty, nebo jak chceme aby se chovaly. Nastavujeme, co jaký kanál vysílače bude dělat a upravujeme, jaký protokol budou regulátory používat. Ve firmwaru také nastavujeme, jaký tvar náš dron má, aby mohl správně ve vzduchu vyvažovat. Zkrátka vše, co se dá nastavit, nastavujeme ve firmwaru. Jedním z nejrozšířenějších firmwarů jsou Betaflight, Cleanflight, Raceflight (zaměřen na závodní drony) a ArduPilot. Betaflight a Cleanflight si jsou velice podobné a svými funkcemi se prakticky neliší. Oba dva jsou jednoduché na ovládání a open-source. Díky tomu se pyšní velkým množstvím podporovaných Flight controllerů. Raceflight kvůli svému úzkému zaměření omezuje několik funkcí, jako například GPS. Díky tomu ale nabízí více výkonu jiným funkcím. ArduPilot je firmware poměrně pokročilý, nabízí nám ohromný počet funkcí a neuvěřitelnou rozšiřitelnost. Málo kdy se využívá u dronů určených k závodění či freestylu. Jeho cílem jsou většinou specializované drony např. drony Horské služby.
Další funkce
OSD: Je funkce, která nám do video výstupu z kamery přidá informace, např. napětí baterie, rychlost, může nám ukázat horizont a další.
PID slouží k opravě chyb z různých senzorů umístěných na řídící desce (např. gyroskop). Úpravou této funkce můžeme docílit větší plynulosti dronu.
Senzory
Další informace

zdroj: mateksys.com

zdroj: techtonics.in
Slovníček pojmů
Baterie
# Popis
Baterie je často neprávem podceňovanou částí dronu. Typů akumulátorů je několik a svými vlastnostmi se velice liší. Je tedy důležité, nikdy nepodceňovat tyto aspekty.
Typy akumulátorů
Parametry
Kromě výše uvedených vlastností sledujeme při výběru akumulátoru tyto parametry: celkové napětí, počet článků (nejčastěji u LiPo), kapacita a vybíjecí proud.
Příklad: 1800mAh 4S 75C - první hodnota nám uvádí kapacitu baterie, druhá počet článku tedy i napětí (4S = 14.8 voltů) a poslední hodnota určuje míru vybíjení. Baterie o kapacitě 1800mAh s mírou 75C může dodávat 135A. Vzorec: (kapacita * míra vybíjení) / 1000 = vybíjecí proud v ampérech.

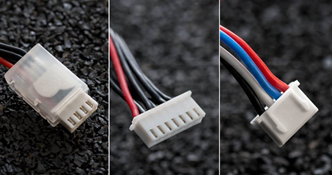
Typy konektorů; zdroj: rcgeeks.co.uk

Typy konektorů; zdroj: rcgeeks.co.uk

Typy konektorů; zdroj: rcgeeks.co.uk
Další informace
typy balance konektoru; zdroj: rcgeeks.co.uk
Vysílač a přijímač
# Popis
Rádiový systém tvoří dva prvky, vysílač (ovladač) a přijímač. Přijímač umisťujeme na model zatím co vysílač držíme v ruce a ovládáme jej. V tomto segmentu se nepohybuje tolik signifikantních výrobců, ale přesto se můžeme setkat s několika druhy technologií, které nejsou vždy kompatibilní. Je proto důležité vybírat kompatibilní zařízení, případně myslet na budoucnost a zvolit nejmodernější technologie.
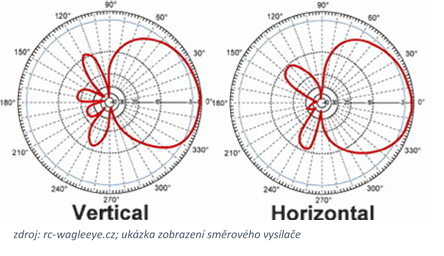
Dosah
Běžný dosah modelářských vysílacích souprav je cca. 1500 metrů. Tuto hodnotu můžeme upravit, a to nejen koupí profesionálních vysílaček. Síla výstupu je údaj, na který si musíme dávat veliký pozor z důvodu zákonů, které nám omezují maximální hodnoty (všeobecné oprávnění č. VO-R/12/09.2010-12 a č. VO-R/10/01.2019-1). Velký rozdíl může učinit správné umístění antén, ať už vysílače či přijímače. Každá anténa má jinou směrovou charakteristiku (existuje několik typů antén všesměrová, whip…), proto si můžeme všimnout například dvou antén na FPV systémech. Každá anténa vykrývá nedostatky druhů. Velmi spolehlivou, ovšem cenově ne tak dostupnou variantou, je koupě tzv. „long range modulů“ (long range R/C systémů….). Nejjednodušší jsou z důvodu časté kompatibility s nejpoužívanějšími značkami vysílačů. Například technologie TBS Crossfire pracuje na nižších frekvenčních pásmech a dokáže tedy nabídnout dosah až několika desítek kilometrů.
Komunikace
Každý výrobce používá svůj určitý „jazyk“ jakým mezi sebou vysílač a přijímač komunikují (např. přijímač značky FlySky nespárujeme s vysílačem značky FrSky). Dále můžeme rozlišovat určité protokoly, kterými spolu komunikují. Klasickým analogovým standardem je PWM, tedy každý kanál připojujeme pomocí jiného kabelu. Dnes se PWM používá spíše jen pro přímé ovládání serv (např. letadla, auta, helikoptéry). U dronů a jiných modelů ovládaných pomocí Flight controlleru se spíše setkáme s PPM, který je stále analogový, ovšem všechny kanály předává skrze jeden kabel. Nejmodernější jsou digitální protokoly, např. SBUS, IBUS, DSM2/X. Nabízejí větší přesnost a rychlost.
Další vlastnosti
Počet kanálů: normální RC vysílačka má 4 kanály (2x2 osy „páček“). Další kanály jsou určeny např. pro páčky (arming, změna letového módu…) nebo trim, který si taktéž můžeme nakonfigurovat dle svého. Běžně se setkáváme se čtyř či deseti kanálovými modely, můžeme si ale také vybírat šestnácti kanálové typy.
Telemetrie: je výstup z dronu, který zobrazujeme na displeji vysílačky nebo v FPV brýlích. Telemetrie nám může říkat hodnoty jako aktuální stav baterie, sílu signálu, souřadnice dronu atd.
Firmware vysílače: s firmwarem se setkáváme, pokud na vysílačce cokoli nastavujeme. Jsou modely (nejčastěji levnější), které pracují s normálním firmwarem dané značky. Jsme tedy omezeni na funkce, které přidá sama značka. Stále více se ale můžeme setkat s otevřenými firmwary jako například populární Open Tx, který můžeme sami upravit.
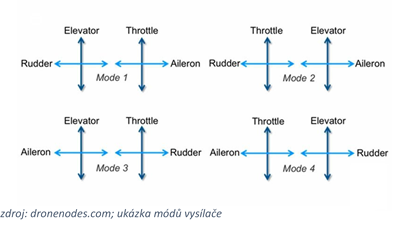
Mód vysílaček: při výběru vysílače nám tzv. mód říká, co každá „páčka“ dělá. Nejčastěji se setkáme s módem 1 a 2.
Další informace
Slovníček pojmů
PDB
# Popis
PDB je často přehlížená část dronu, a to z důvodu určité nadbytečnosti. V kapitole ESC je psáno o tzv. „4 in 1“ ESC, tato komponenta nám v podstatě odstraňuje nutnost užití samostatného PDB v našem modelu.
Funkce
Power distribution board jak již název napovídá distribuuje proud a reguluje napětí. A to nejen k motorům, respektive k jejich regulátorům, ale i k FC, LED diodám, vysílači nebo k čemukoliv jinému co bychom rádi napájeli (Arduino, GPS atd.).
Velikost (upevnění)
PDB má z pravidla mívá stejné rozměry jako Flight controller abychom je mohli usadit do stejného místa neboli „věže“. PDB pro FC typu Pixhawk je stejně velké jako samotný FC ze stejných důvodů.
Výběr
Výběr správného PDB nezáleží jen na motorech které chceme využívat ale i na baterii či na velikosti rámu. Vždy je dobré vybírat desku s výkonnostní rezervou. Starší desky nemusí podporovat nejnovější 6-ti článkové baterie.
Další informace
Slovníček pojmů
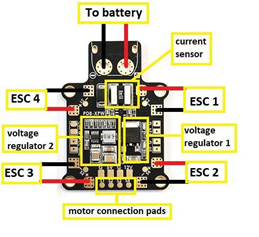
popis PDB; zdroj: dronenodes.com
Video vysílání/přijímaní
# Popis
Tato kapitola je úzce spojena s kapitolou Vysílač a přijímač, protože i zde máme podobné aspekty jako jsou frekvence, zisk antény, odpor…
Funkce
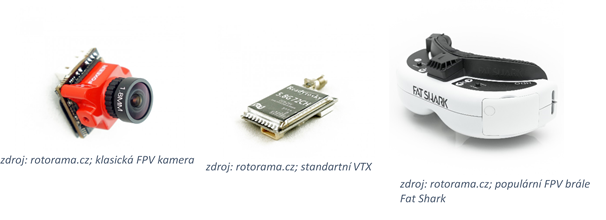
Video vysílač nemusí sloužit pouze k přenosu videa z FPV kamery, zároveň může k obrazu vložit tkz. OSD tedy informace o modelu k vysílanému videu. K pořizování videa nemusí volit pouze klasické FPV kamery ale i kamery typu GoPro a podobné.
Typy
Mezi nejrozšířenější typ patří klasické analogové vysílače, ty ovšem velmi omezují kvalitu obrazu (640x480 bodů). Jsou ale velmi dostupné. Alternativou k nim jsou vysílače digitální ty dokáží vysílat obraz až ve FullHD kvalitě, jsou ovšem mnohonásobně dražší a z pravidla těžší. Také bývá složitější dosáhnout delších vzdáleností z důvodu užití vyšších pásem (5,8 GHz). Analogové systémy mohou využívat i pásma 2,4 Ghz či 1,2 GHz které napomáhají i větší odolnosti vůči překážkám.
Přijímač
Velmi častým způsobem příjmu signálu jsou tkz. FPV brýle které nám poskytují pohled z první osoby. Tyto brýle ale fungují v podstatě na stejném principu jako klasická obrazovka jen jsou přizpůsobeny k nošení na hlavě. Můžeme ale využít pouze přijímač který poté připojíme například k televizi nebo již zmíněné standardní obrazovce.
Dosah
Většina dnešních modelů dokáže bez problému vysílat do vzdálenosti jednoho kilometru (bez výrazných překážek). Chceme-li ale létat do velkých vzdáleností nebo v husté zástavbě budeme muset vybírat vysílač který má vysoký výkon a užívá nízkých frekvencí, nejlépe 1,2 – 1,3 GHz. Výkon vysílače se udává v mW, nejčastěji 25mW, 200mW, 400mW, 600mW (výkonnější vysílače mění vhodné užívat v uzavřených prostorách kvůli odrazu signálu od objektů, pro přijímač je poté mnohem těžší detekovat přijímač). Čím vyšší výkon vysílač má, tím více se zahřívá. Při použití výkonnějších modelů musíme dávat pozor na správné umístění nebo budeme muset použít aktivní chladící prvek.
Kanály
Kanály jsou jednotlivé předdefinované frekvence s určitým odstupem mezi sebou. V případě že na jednom místě létá více lidí, je dobré se dohodnout který kanál kdo bude využívat, aby nedocházelo k rušení.
Kamery
Pomineme li kamery typu GoPro (či ve výjimečných případech klasických fotoaparátů a kamer), vybíráme mezi FPV kamerami. U těchto kamer sledujeme několik parametrů. FOV tedy zorné pole, kódování signálu (NTSC nebo PAL): NTSC podporuje vyšší rozlišení než PAL, poměr stran (16:9/4:2), horizontální rozlišení nebo také TVL (čím vyšší tím lepší, např. 1000TVL) dále také dynamický rozsah, velikost objektivu, latenci nebo typ čipu.
No comments to display
No comments to display